问题 🔗
- 从关闭的 channel 读取数据,如以下情况输出什么。如果是发送数据,再关闭一次 channel的操作呢?怎么判断 channel 的是否关闭
func main() {
ch := make(chan int,2)
ch <- 1
close(ch)
num1, ok1 := <- ch
num2,ok2 := <- ch
println(num1,ok1)
println(num2,ok2)
}
- channel 底层实现
- 无缓冲 channel 与有缓存 channel 区别
- channel VS mutex
channel 简介 🔗
Do not communicate by sharing memory; instead, share memory by communicating.
不要通过共享内存来通信,而要通过通信来实现内存共享。这是 CSP(Communicating Sequential Processes)的思想,也是 Go 并发设计上的哲学。CSP 认为如果编程语言中把侧重点放在 processes 间的通信,那么并发编程会变得很简单,而 Go 中 channel 就是通信实体的实现,可以看作成一个协程间的消息队列。
channel 使用 🔗
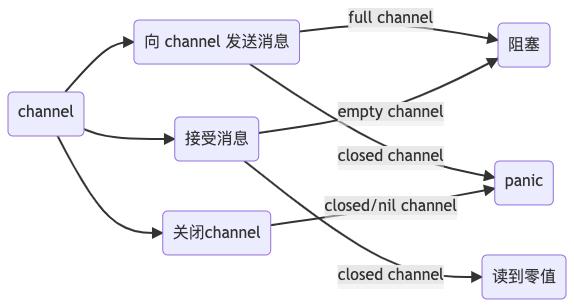
对 channel 的操作有四种:
- 创建 channel:
ch := make(chan int)ch:=make(chan string, 10) - 向 channel 发送消息:
ch <- num - 从 channel 接受消息:
num <- ch,num, ok := <- ch - 关闭 channel:
close(ch)一些对 channel 操作可能出现的一些边界条件情况如下图所示,其中 full channel 与 empty channel 在无缓冲和有缓冲 channel 下e的概念稍有不同,在下文中解释
channel 实现 🔗
数据结构 🔗
channel 的底层数据结构如下代码所示,个人认为主要由一个 buf 数组 + 2 个 goroutine 链表组成
// src/runtime/chan.go
type hchan struct {
qcount uint // chan 中元素个数
dataqsiz uint // chan 底层循环队列的长度
buf unsafe.Pointer // 指向 循环队列的指针
elemsize uint16 // chan 中元素大小
closed uint32 // 是否关闭的状态位
elemtype *_type // 元素类型
sendx uint // 已发送元素在循环队列中的索引
recvx uint // 已接受元素在循环队列中的索引
recvq waitq // 等待接受数据的 goroutine 队列
sendq waitq // 等待发送数据的 goroutine 列队
lock mutex // 保护上述字段
}
buf: channel 流动的缓冲区,实际上是一个指向循环队列的指针,数据有无缓冲的 channel 的区别在这。无缓冲的 channel 即这个 buf 在初始化时没有分配内存。recvq与sendq: 阻塞的 goroutine 链表,分别是等待接受和等待发送数据的 goroutine 链表- 其它字段基本是描述 buf 状态的:如 buf 容量(
dataqsiz),buf 具有的元素个数(qcount),buf 中一个元素所占内存大小(elemsize),sendx与recvx描述 buf 循环数组中可向channel发送消息与接受channel 中消息的索引位置 …
附上一个 channel 结构的网图供参考

向 channel 发送消息 🔗
ch <- num
一般的向 channel 发送消息流程如下图:
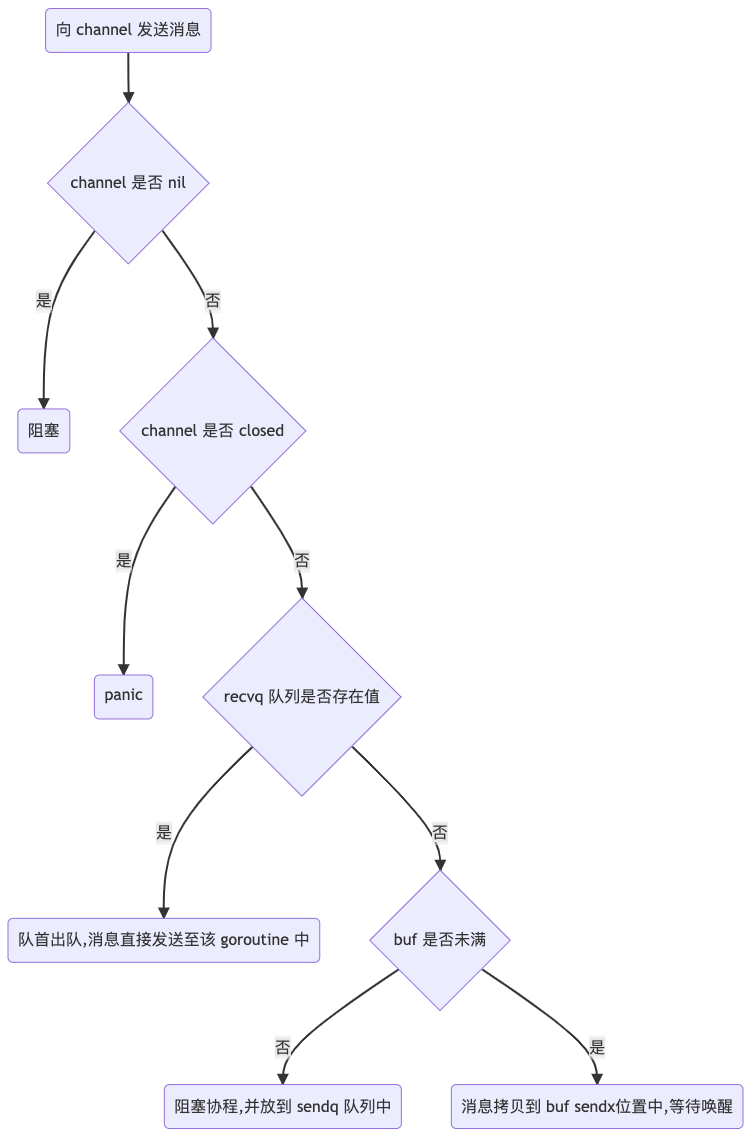
当然实际代码稍微复杂一些:在 channel 与
select,case一起使用时,case 语句需要即时收到返回值,不能阻塞等待。因此需要一个非阻塞的模式,在 channel 为 full 时,不等待直接返回结果。
直接上代码,实现起来也比较简单,基本是入队出队操作,有兴趣的可以看一下
// src/runtime/chan.go
ep 是发送数据的指针, block 表示是否可以把当前协程阻塞,放到 sendq 队列,同步等待结果,一般都是true。只有 select 时,不阻塞协程,直接返回。返回值表示是否成功发送数据
func chansend(c *hchan, ep unsafe.Pointer, block bool, callerpc uintptr) bool {
// channel 为 nil
if c == nil {
// select 非阻塞,直接返回 false
if !block {
return false
}
// 阻塞协程
gopark(nil, nil, waitReasonChanSendNilChan, traceEvGoStop, 2)
throw("unreachable")
}
// 省略一些...
// select 非阻塞,如果 channel 没有关闭, channel 为 full:有缓冲(buf 满了),无缓冲(recvq 为空)
if !block && c.closed == 0 && full(c) {
return false
}
// ... 省略了一些...
// 如果 channel 关闭了,panic
if c.closed != 0 {
unlock(&c.lock)
panic(plainError("send on closed channel"))
}
// 若 receq 不为空,把 receq 队列取一个 goroutine,直接把其要发送的消息ep发到取到的 goroutine 中。存在两种情况
// 1. 这是无缓冲 channel发送数据的过程,
// 2. 有缓冲 channel receq 不为空,则说明其 buf 数组为空,
if sg := c.recvq.dequeue(); sg != nil {
send(c, sg, ep, func() { unlock(&c.lock) }, 3)
return true
}
// 有缓冲 channel,且其 buff 数组还没满,把 ep 数据放到 buf 中
if c.qcount < c.dataqsiz {
// 返回sendx 指向的地址
qp := chanbuf(c, c.sendx)
// 把 ep 中的消息 copy 到 buf 中
typedmemmove(c.elemtype, qp, ep)
// sendx count... 的修改
c.sendx++
if c.sendx == c.dataqsiz {
c.sendx = 0
}
c.qcount++
unlock(&c.lock)
return true
}
// 以上都不成功,阻塞当前协程
// ...
c.sendq.enqueue(mysg) // 当前协程入队 sendq
// ...
gopark(chanparkcommit, unsafe.Pointer(&c.lock), waitReasonChanSend, traceEvGoBlockSend, 2) // 阻塞
// ...
}
这里解释下 full/empty channel。
| Channel 类型 | Full | Empty |
|---|---|---|
| 无缓冲 | reveq 队列为空:没有等待接受消息的协程 | sendq 队列为空:没有等待发送消息的协程 |
| 有缓冲 | buf 数组已满 | buf 数组为空 |
总结
- 无缓冲 channel 发送消息是直接将消息从发送者的栈拷贝到接收者的栈
- 有缓冲 channel发送消息是将消息拷贝到 channel buf 中
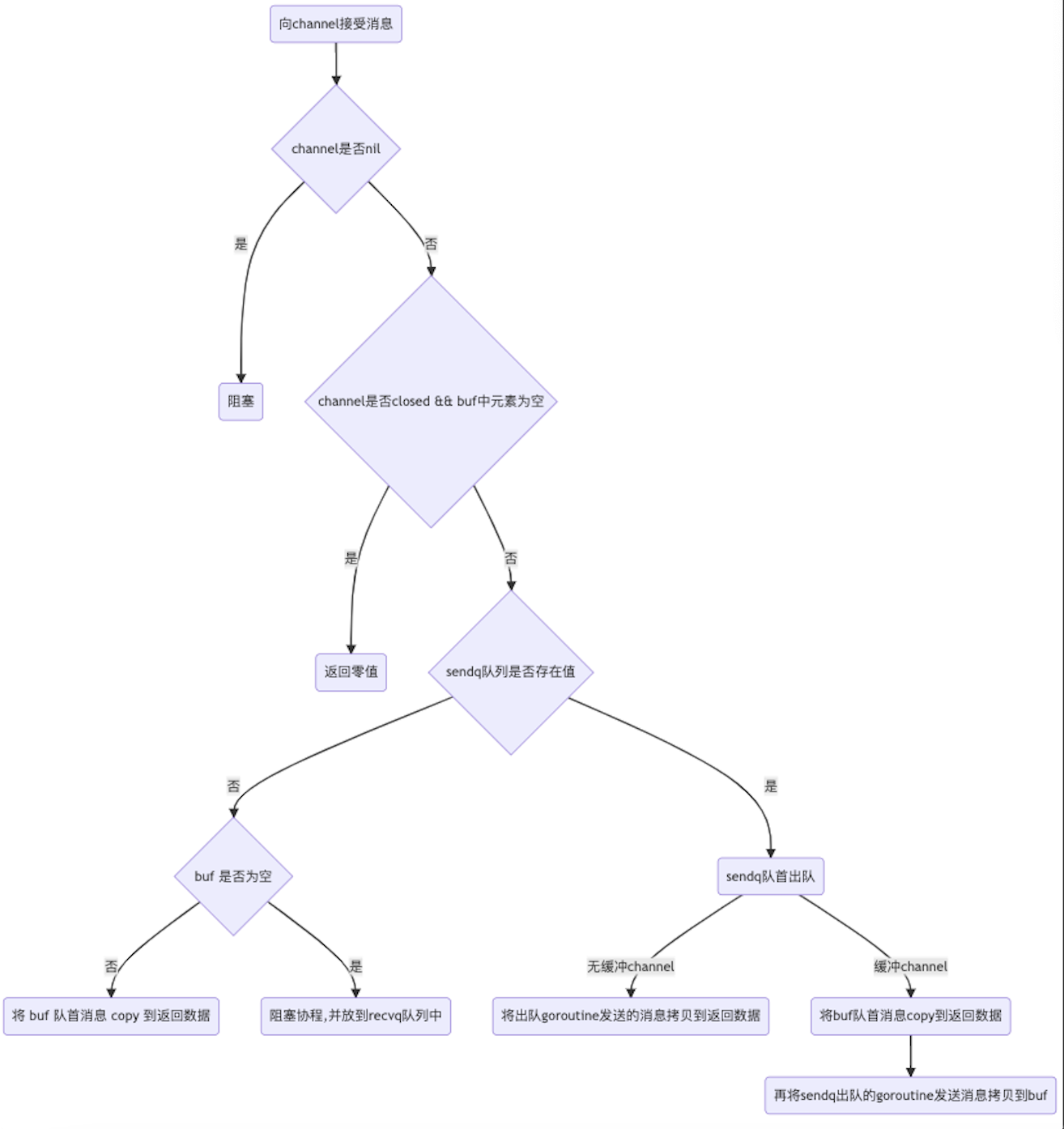
从 channel 中接受消息 🔗
num <- chnum,ok <- ch第二个布尔返回值代表着这次通信是否成功,只有当 channel 是关闭状态并且 channel 是 Empty 才返回 false,也就是说即使channel 已经关闭,但如果其还有消息在 buf 中,返回的布尔值是 true。
向 channel 接受消息的流程与发送消息类似,整体如下图所示:
此示意图也省略了考虑不阻塞的场景(与
select,case)
代码详情如下
// ep: 接受数据,block:是否阻塞式接受, selected: 是否有返回值(select 语句 并且 channel empty 无返回值) received: 此返回值是否是正常由发送者发送过来的数据
func chanrecv(c *hchan, ep unsafe.Pointer, block bool) (selected, received bool) {
// channel 为空
if c == nil {
// 非阻塞直接返回 false false
if !block {
return
}
// 阻塞协程
gopark(nil, nil, waitReasonChanReceiveNilChan, traceEvGoStop, 2)
throw("unreachable")
}
// 非阻塞快速失败
if !block && empty(c) {
// channel 没有关闭,返回 false,false
if atomic.Load(&c.closed) == 0 {
return
}
// channel 已经关闭, 需要返回零值,因此返回:true,false
if empty(c) {
if ep != nil {
typedmemclr(c.elemtype, ep)
}
return true, false
}
}
// ...
// 得操作 buf 或者 sendq 队列了,并发需要加锁
lock(&c.lock)
// 如果 channel 已经关闭, 并且 buf 为空,返回零值
if c.closed != 0 && c.qcount == 0 {
unlock(&c.lock)
if ep != nil {
typedmemclr(c.elemtype, ep)
}
return true, false
}
// 发送队列不为空, 有两种情况sendq 不为空
// 1. 无缓冲 channel,直接将队首的消息 copy 到 ep 指向的数据中
// 2. 有缓冲 channel,但是其 buf 已满。其中操作需要把 buf 队首数据 copy 到 ep 指向的数据, sendq 队首出队,将其发送的消息copy 到 buf 中
if sg := c.sendq.dequeue(); sg != nil {
recv(c, sg, ep, func() { unlock(&c.lock) }, 3)
return true, true
}
// buf 不为空,将 buf 队首数据 copy 到 ep
if c.qcount > 0 {
// Receive directly from queue
qp := chanbuf(c, c.recvx)
// ....
if ep != nil {
typedmemmove(c.elemtype, ep, qp)
}
typedmemclr(c.elemtype, qp)
c.recvx++
if c.recvx == c.dataqsiz {
c.recvx = 0
}
c.qcount--
unlock(&c.lock)
return true, true
}
// 非阻塞直接返回
if !block {
unlock(&c.lock)
return false, false
}
// 阻塞
gp := getg()
mysg := acquireSudog()
c.recvq.enqueue(mysg) // 入 recvq 队
// ...
gopark(chanparkcommit, unsafe.Pointer(&c.lock), waitReasonChanReceive, traceEvGoBlockRecv, 2) // 阻塞
// ...
return true, success
}
总结
- 可以向 closed channel 接受值,若其 buf 为空,则返回零值。若其 buf 不为空,正常返回
- 无缓冲 channel 接受消息,是由另一个 goroutine 里的栈直接拷贝过来的
- 有缓冲 channel 总是取 buf 队首消息,但如果 sendq 不为空,还需要把 sendq 需要发送的消息拷贝到 buf 中
channel vs mutex 🔗
Do not communicate by sharing memory; instead, share memory by communicating.
上述思想实际上就是并发编程中的 共享内存模型 VS CSP 信息传递模型,更具体的说: mutex VS channel,Go 是第一个引入 CSP 思想并且发扬光大的语言。那这是不是意味着我们在编程中要摒弃 mutex,全部使用 channel 呢?既然 Go 设计者这么推崇 CSP, 为什么 Go 中还是有 mutex 包呢?
channel 与 mutex 侧重点不一样,channel 侧重于协程之间传递数据,mutex 用来保护并发数据
适用于 channel 的场景:
- 传递数据的所有权,即把某个数据发送给其他协程
- 分发任务,每个任务都是一个数据
- 交流异步结果,结果是一个数据
适用于 mutex 的场景:
- 缓存
- 状态
实际上,channel 的底层数据结构中也利用 mutex 保护数据,但是适用于 mutex 的场景去使用 channel 性能会差一些。
更具体的我们可以根据下图进行判断
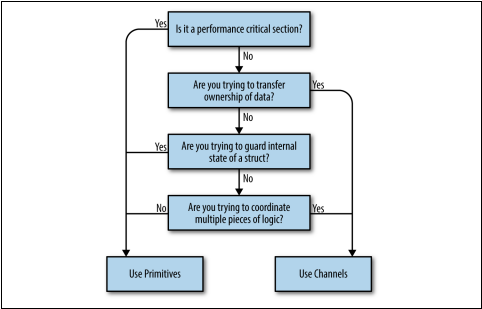
channel 实际场景
- 超时控制/定时任务
- 并发控制
- 解耦生产者,消费者
- …
总结
- channel 不是银弹,该用 mutex 就用 mutex
- channnel 用于关注数据流动,mutex 保护固定数据